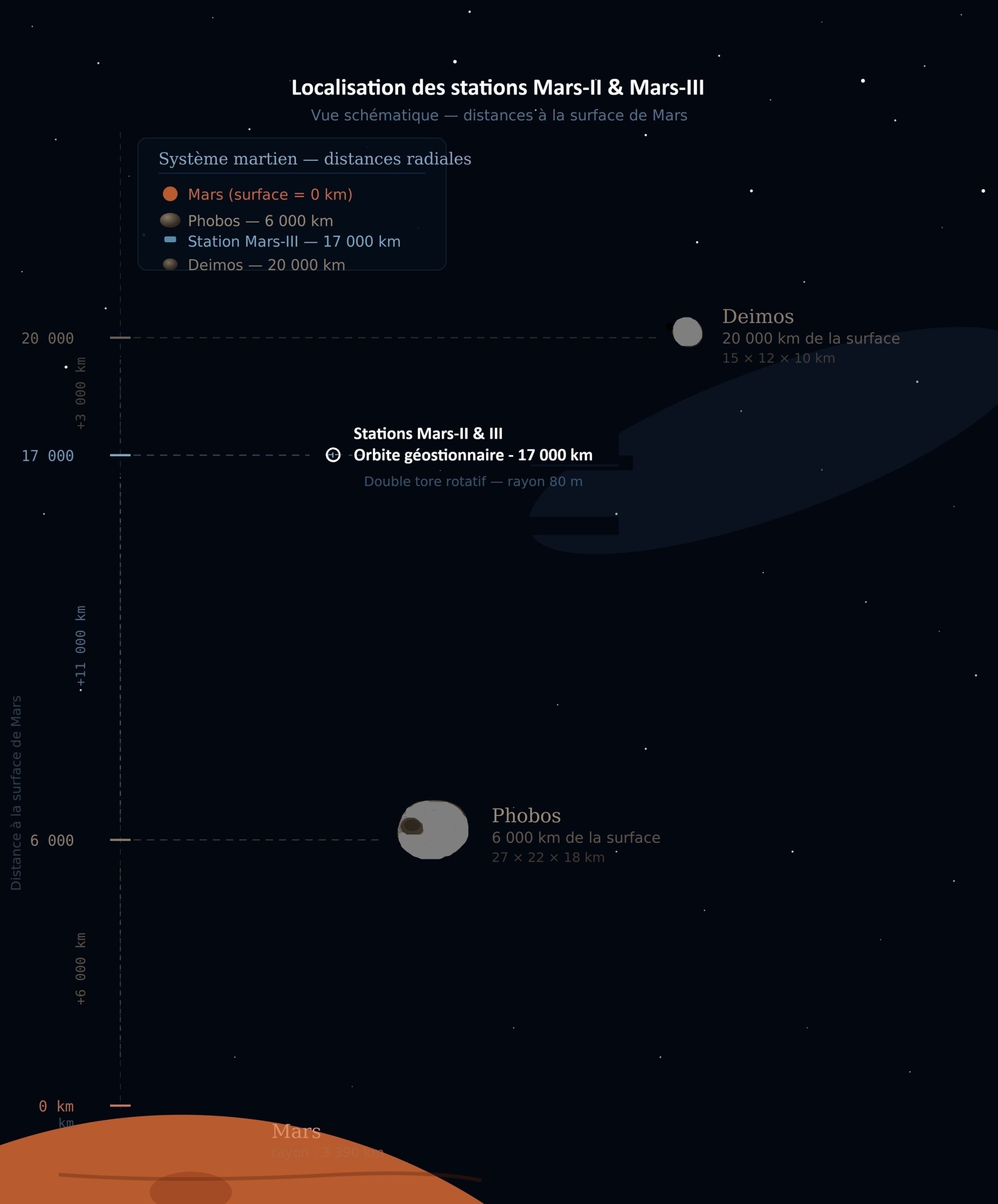
The « Mars II Station », a pivotal step in our progression toward Mars
Where we can see that the Phobos and Deimos moons might be essential to get it built
Our technological advances have set us firmly on the path of space conquest, even if some of our contemporaries would prefer otherwise. Mars is the objective, even if the planet is sometimes eclipsed from view. The first phase was robotic exploration. It is not yet complete. But the second phase is taking shape: crewed flights. A third phase will follow — permanent settlement. We do not yet know in what form, since, as discussed in this blog, the medical conditions for long-term habitation on the surface may not be met (and may never be)*. The decision will be made following (2035) the first crewed mission, which could depart in 2033 if Starship is ready on time. If long-term living on Mars proves impossible, the only remaining option will be to live nearby (to exploit its resources), in a rotating orbital station. It will need to be increasingly well-suited to human life and ever more comfortable to attract people from Earth.
*SANS syndrome (Spaceflight-Associated Neuro-Ocular Syndrome).
Point of departure
The first crewed Mars mission, combined with the experience of living aboard the rotating station at the Earth-Moon L1 Lagrange point generating 0.5g of gravity — which I have proposed (« L1EML ») as a replacement for the ISS — will tell us what level of gravity is essential for long-term life beyond Earth. If 0.5g or even 0.7g proves sufficient, this would be excellent news, as it would allow for a rotating station near Mars that is less massive than a 1g design, in which the human body would not be subjected to unacceptable conditions (gravity neither too strong to cause excessive weight, nor too low to risk SANS syndrome). The ideal location would be an areosynchronous orbit, as it would allow surface operations without time lag via telerobots, with occasional human visits to the surface.
NB: Lockheed Martin’s Mars Base Camp project shares a similar spirit of an orbital Mars base. However: (1) its habitable volume is very limited; (2) it provides no rotation and therefore no artificial gravity; and (3) its radiation shielding is very limited. For these reasons, a surface base on Mars would still be preferable to it. Its « Mars Lander » shuttle, however, could potentially be repurposed — unless the Starship-vessel is used directly.
Design
The station I would call « Mars II » would use exactly the same components as the L1EML station — notably, for the torus, segments 10 metres long and 6.5 metres in diameter; for the radial tubes, segments 10 metres long and 4 metres in diameter. Since the target gravity (let us take the worst case of 0.7g) would be slightly higher than inside L1EML, and since we would want to avoid worsening the head-to-foot gradient and the Coriolis effect, we would instead increase the torus radius, bringing it to 80 metres. This has two important consequences: (1) a greater overall mass — roughly 10,000 tonnes for Mars II versus 6,000 tonnes for L1EML; (2) a slightly lower curvature for the Mars II torus segments compared to L1EML. The thrust needed to adjust the rotation speed will be applied from each of the four radial tubes, at a point as close as possible to the torus (taking the total mass into account).
The rotation axis design will follow the same principle — fixed, with rotating elements at the junction of the radial tubes and on either side of that junction, beyond the two storm shelters, to anchor the cables that maintain the integrity of the rotating section relative to the axis. The axis will also house the non-rotating modules for EVA, docking, and telecommunications.
The torus protective shell will be very massive. For the L1EML station, the torus will have been wrapped in HDPE polyethylene. Its hydrogen richness makes it a very effective radiation shield, but still insufficient for very long stays — two synodic cycles (18+26 months), for example. On Mars, adequate radiation shielding requires about 2 metres of material (regolith type). The shell must also protect against micrometeoroids. Given its mass, it will be fixed, like the central axis structure. As an independent structure, it will be held in position relative to the rotating torus not by continuous mechanical contact, but by a few magnetic or gas anchoring points — gas cushions (air bearings) or localised magnetic bearings, spaced every 10 metres for instance, centring the shell without truly touching the torus. The shielding materials will be held in bags retained by carbon-fibre nets. The shell will also carry a few external thrusters to slightly adjust its « stillness » relative to the axis as needed. It will serve as a support for all kinds of equipment — antennas, solar panels, thermal radiators, sensors — everything that works better without rotation. A passageway between the shielding and the rotating torus (1.8 m) will allow inspection and maintenance by robotic or human intervention.
The protective shell would not be entirely closed, but would leave a transparent band open toward the station’s axis (ceiling). This band would be wide enough (90°?) to accommodate the anchoring of the radial tubes and the bracing cables that hold the station together. It would be occupied by a circular tube filled with the drinking water supply — serving the dual purpose of admitting light and shielding against radiation. NB: grey water would circulate through the torus floor and be recycled in several dedicated compartments within the torus.
Supply of structural components
. For the various components of the station, it is necessary to consider not only products manufactured in the best factories on Earth, given the required precision and reliability, but also the best materials, for reasons of weight and safety. This means aerospace-grade aluminium for cylindrical or spherical modules, titanium for joints, steel or carbon fibre for cabling, and titanium for bearings. These components can therefore only come from Earth, since no industry will yet have been able to develop on Mars.
For the radiation and micrometeoroid shielding shell, local raw material may and must therefore be used. Among these, the best option would be the regolith of Phobos. This will avoid having to extract large masses from a high-gravity site (the Martian surface). Bags of crushed rock and dust would be assembled there and packaged in volumes compatible with their use inside the shell.
Finally, water is essential to life, and the large quantities required can only come from Martian ice — although Starships arriving from Earth will be able to bring some. Once a sufficient stock has been established, it can be recycled, with periodic partial replenishment.
We will therefore need to bring from Earth all manufactured components, from Phobos the raw shielding material, and from Mars the water.
For the deliveries from Earth, this presents no energy problem: what matters in a delivery to the vicinity of Mars from Earth is escaping Earth’s gravity well. Once out of that well, a cargo vessel consumes very little energy for its journey (unlike a crewed rocket, which must carry a full life-support system). The only constraint is the 26-month gap between each Earth launch window. Phobos could serve as the initial destination for deliveries from Earth and as a storage base, rather than descending to the planet — the delta-v relative to areosynchronous orbit would be lower, facilitating transfers. Moreover, Phobos is large enough to be developed and used as a primary staging base. A radiation shelter could be excavated robotically within Phobos (for the robots and the operators who will command them) before the first deliveries begin.
The next phase: transport to site and assembly
From Phobos, one option might be an electromagnetic launch rail, as envisioned by Gerard O’Neill for sending lunar material to Earth-Moon L2. Another, more modern and perhaps better-suited approach would be to convey materials to the station site using orbital transfer vehicles of the type currently being developed by Pave Space* (LYOBA), which enable transfer from one orbit to another.
An alternative — not mutually exclusive with LYOBA — would be to send these same masses from Phobos to Deimos for assembly. The advantage would be a fixed, tangible destination, with non-zero gravity to help gather elements in one place, and a location closer to areosynchronous orbit. Drawbacks: (1) Deimos is 20,000 km from the Martian surface, while areosynchronous orbit is at 17,000 km — however, gravitationally it is easier to move from a higher to a lower orbit than the reverse; (2) Deimos is small (15×12×10 km) and has a very small mass (1,500 billion tonnes, one-seventh that of Phobos), so its gravitational attraction is weak (306 μ g). This low gravity is both a disadvantage and an advantage: the disadvantage is that working there will be almost as difficult as in open space at the same distance, and retaining elements sent from Phobos will not be easy. The advantage over Phobos is that the same low gravity will make it easier to maneuver masses and subsequently to move the station structure toward its final destination.
*Pave Space is the start-up led by the team behind the Gruyère Space Program — Julie Böhning and her colleagues.
Future evolution: Mars III Station
The next rotating station could be a double torus, rotating at the ideal radius for minimum acceptable gravity (still 0.7g?) given an acceptable head-to-foot gradient, an acceptable Coriolis effect, and minimum mass.
« Double torus » means two tori of identical diameter, at the same distance from the central axis and rotating at the same speed. Their radial tubes would connect to the central axis at a 45° offset from one another, strengthening the overall structure. The two tori would be linked by eight quarter-circle tubes, each running from one radial tube of one torus to the unshielded band of the other (the same width as the radial tubes, i.e. 4 metres in diameter), with the arc oriented inward (toward the central axis). The advantages would be: greater structural integrity, the ability to mount the small thrusters for rotation speed adjustment on these connecting tubes, and incidentally the segmentation of water reserves into 8 compartments (improving station stability). NB: the distance between thrusters (approximately 60 metres for an 80-metre-radius torus rotating at 2.80 rpm, the lowest reference value) would be structurally manageable (especially since the thrust would be applied horizontally, not directly toward the next arc).
The distance between the two tori (on two parallel planes) would be 8 meters for safety reasons and in order not to add too much mass to the whole. Given the dimensions of each torus (6.5 m), the radiation shielding (2m+2m), and the service passage (1.80 m + 1.80 m), the radial tube connections (4 m) to the central axis will be 10.1 m apart (1.25 + 2 + 1.8 + 1.8 + 2 + 1.25). Adding 4 m x 2 in diameter for tube access and 1 m x 2 for the hull above and below the access (necessary for the module’s resistance), the entire central node would measure 20.2 meters. This corresponds to twice the transportable height in a Starship. Therefore, two modules, each 8 m in diameter and 10 m high, will be built and joined on-site with a platform between them to strengthen the vertical communication tubes at their center.
This improvement will be one more step toward the Stanford Torus, which we will one day achieve! In any case, the path outlined in this article may be the only viable one. If the need for gravity above 0.38g is confirmed by the experience of the first crewed mission, Mars II will be the only viable form of lasting human presence in the vicinity of Mars. We must therefore begin working toward it now, step by step. And let us not fear the cost. We will have Starship, with its XXL payload capacity (150 tonnes to Martian orbit), at prices that will keep falling as reusability and recovery become routine.
Copyright Pierre Brisson
title illustration: localisation Mars-II and Mars-III, image made with the help of claude.ai
illustration below: Stanford torus external view by Don Davis.